Jump to video!
Remote controlled features:
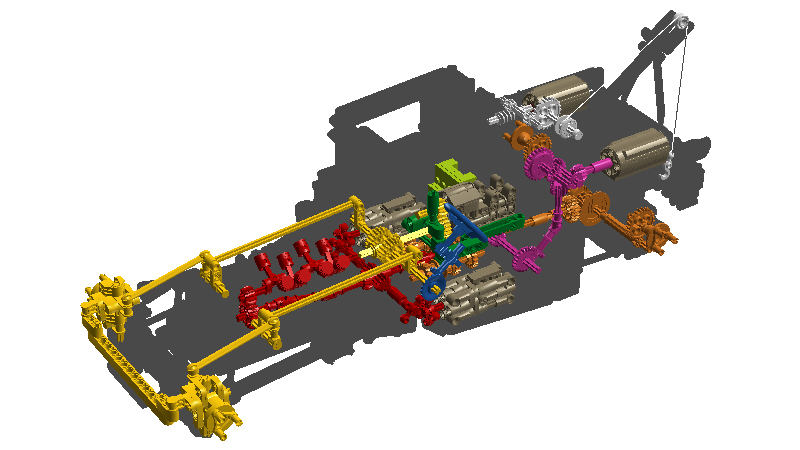
- drive (2 × PF L)
- steering (PF servo)
- 2-speed gearbox (PF M)
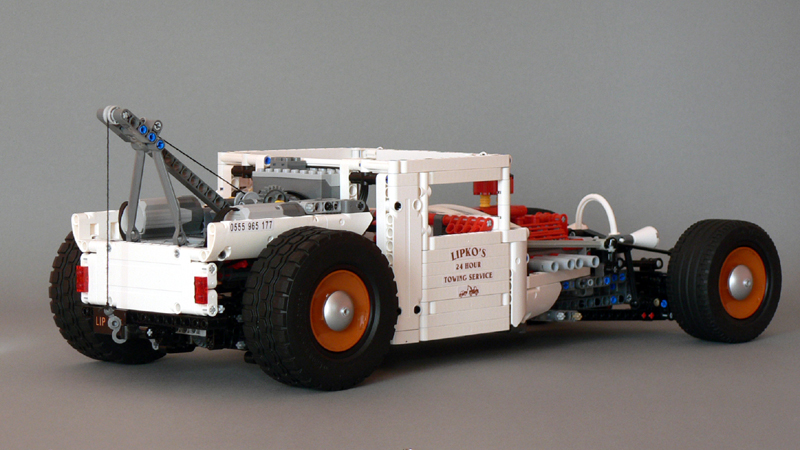
- auto crane with winch (PF M)
Other features:
- live axle push-rod suspension
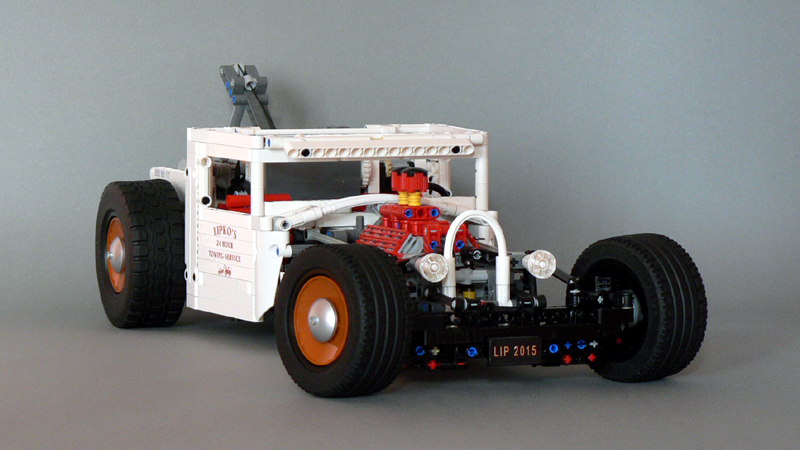
- working steering wheel
- working gear stick
- opening doors
- working V8 fake engine
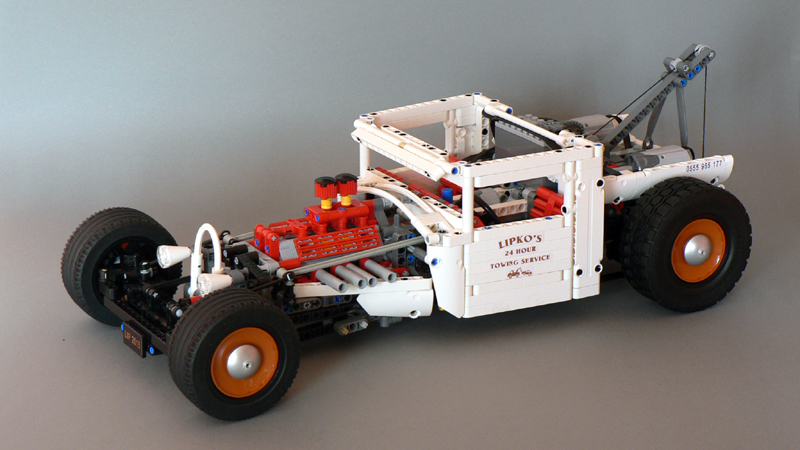
- custom stickers (stickers were covering only one piece each)
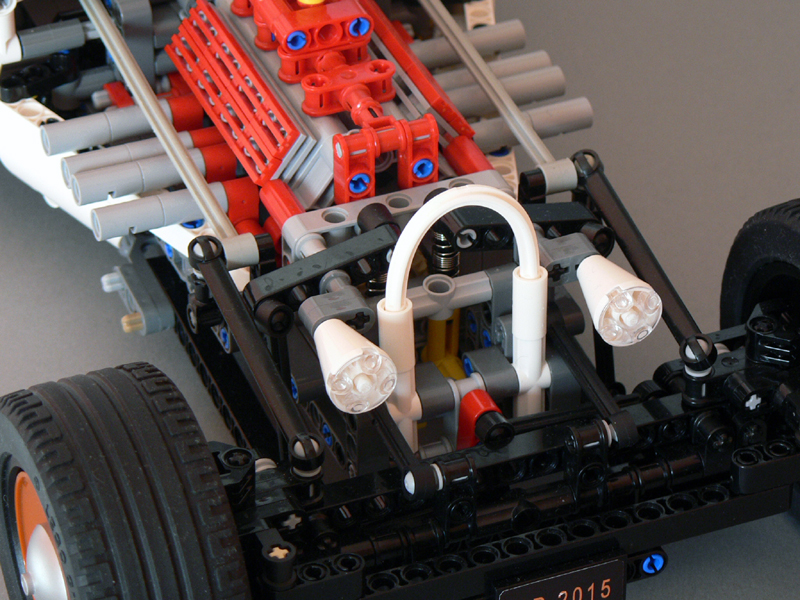
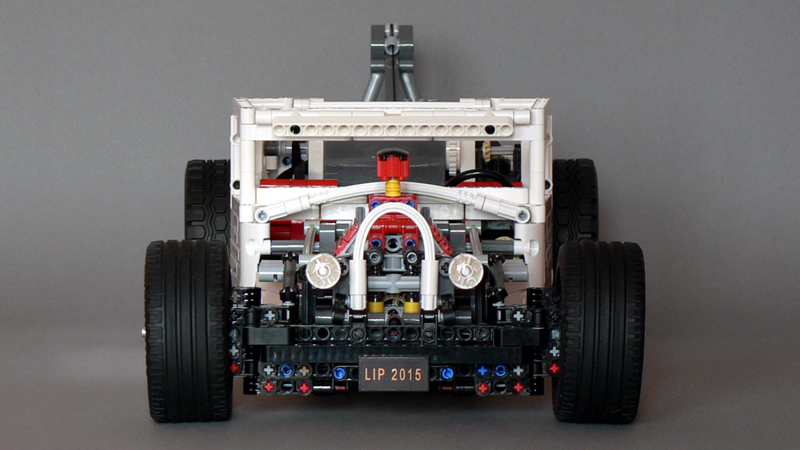
Suspension:
The front and rear axles were live axles with four-four trailing arms and Watt's linkage which prevents sideways motion with a much more straight vertical motion in contrast with the Panhard rod. Watt's linkage is quite popular in hot and rat rods' suspensions.
The axles had push rod suspension instead of being directly connected to the shock absorbers, and this ensured that the load on the shock absorbers was longitudinal. The result was a very responsive suspension with low friction. Actually this has been the best suspension I have built up to date.
The front push rods were attached to the lower trailing arms, just like the shock absorbers in many hod and rat rods.
Steering:
In the steering system (Pitman arm + drag-link) everything was doubled to minimize backlash. There was still quite amount of backlash, and surprisingly enough, most of the backlash was not caused by the linkage but the gearbox (only a gear reduction and a doubled bevel gear pair). The car drove okay but didn't like bumps.
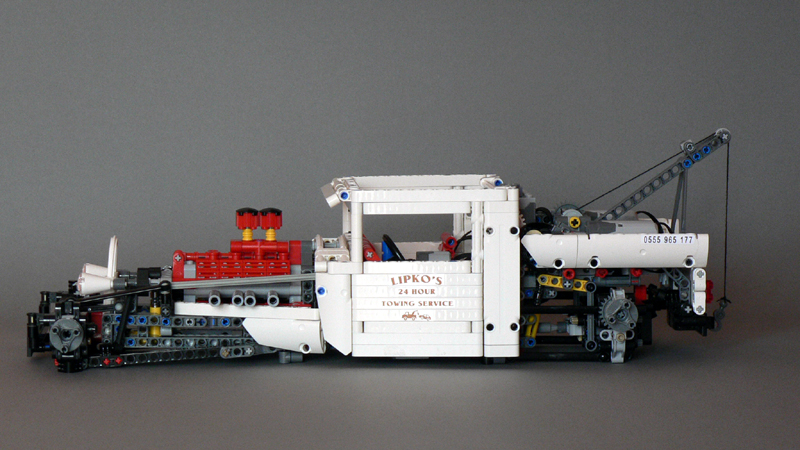
Design process and challenges
The concept changed several times at the beginning of the development, my first idea was to have a closed-cabin hot-rod sedan with remote controlled ride height and gearbox. As I couldn't come up with a good concept for the ride height adjustment in the short time, I had to look for another RC function. All I could find was the wrecker concept for rat-rods and I didn't want to ditch the whole hot-rod idea because I wanted to build one since some time.The biggest challenge was the steering as it was a risky concept to use linkage because the backlash could have ruined drivability completely. The space was limited for a linear mechanism to actuate the drag-links so I implemented Pitman arm with a steering box. Aligning the double Pitman arms and the servo motor axle was achieved with 12-teeth and 20-teeth gears since it's possible to mesh them in a way that one axle is rotated with 45°. But this meant double 12:20 gear-pairs (to have a full rotation of 90°) which increased backlash. Implementing rack-and-pinion steering had its own problems since the articulation of the suspension was quite big and the area behind the axle was already filled with the shock absorbers, structural elements and the fake engine.
Another big challenge was placing the motors and other PF elements. The battery box and the two medium motors (driving the gear selector and the auto-crane) could only be placed on the pickup bed. Visually it was acceptable since the bed of a wrecker (especially for a rat rod) can be full with boxes, tanks and other widgets.
This was the first model for which I designed stickers.
I was very satisfied with the model, the suspension worked flawlessly and it looked pretty good.
It achieved 6th place in the contest which is pretty good, since it had numerous complex builds and designs of some Technic Masters.









External links: